Teleoperación de robots humanoides genera nueva categoría laboral en manufactura global
Operadores humanos que controlan robots a distancia mediante sensores de movimiento y realidad virtual representan un modelo de trabajo emergente con implicaciones directas para la automatización industrial y la recopilación de datos de entrenamiento para IA.

Una categoría laboral emergente toma forma en el corazón manufacturero de China: operadores humanos que controlan robots humanoides en tiempo real mediante cascos de realidad virtual, controladores de mano y sensores de seguimiento corporal. Startups como IO-AI Tech, ubicada al norte de Shenzhen, desarrollan sistemas de teleoperación que permiten a trabajadores dirigir robots en entornos como pisos de fábrica y tiendas de conveniencia, ejecutando tareas de precisión como surtido de anaqueles y selección de productos en almacén.
El modelo tiene una doble función estratégica: generar valor operativo inmediato y acumular datos de entrenamiento para sistemas de IA autónoma. Cada movimiento del operador humano —transferido fielmente al robot mediante algoritmos de adaptación cinética— se convierte en información estructurada que alimenta modelos de aprendizaje automático. La complejidad técnica radica en que humanos y robots no comparten las mismas proporciones físicas ni distribución de peso, por lo que los sistemas requieren un nivel de autonomía parcial para mantener el equilibrio del robot sin intervención constante del operador. Esta arquitectura híbrida —control humano más autonomía reactiva— define el estado actual del arte en robótica humanoide aplicada.
Para el C-suite, el fenómeno plantea preguntas concretas sobre el futuro de la fuerza laboral industrial. En China existen actualmente decenas de modelos de robots humanoides y manos robóticas comerciales disponibles, lo que ha creado una demanda real de middleware de teleoperación compatible con múltiples plataformas. Entorno identifica en este segmento una señal temprana de reconfiguración del trabajo de precisión: antes de que los robots operen de forma completamente autónoma, habrá una fase intermedia —posiblemente de varios años— en la que operadores remotos especializados representen un eslabón crítico en cadenas de suministro y operaciones de retail. Las empresas que definan estándares de interfaz y protocolos de datos en esta etapa transitoria tendrán ventaja estructural cuando la autonomía plena sea técnicamente viable.
Sigue leyendo
 Inteligencia Artificial
Inteligencia ArtificialComputación cuántica con corrección de errores podría ser operativa antes de lo previsto
 Inteligencia Artificial
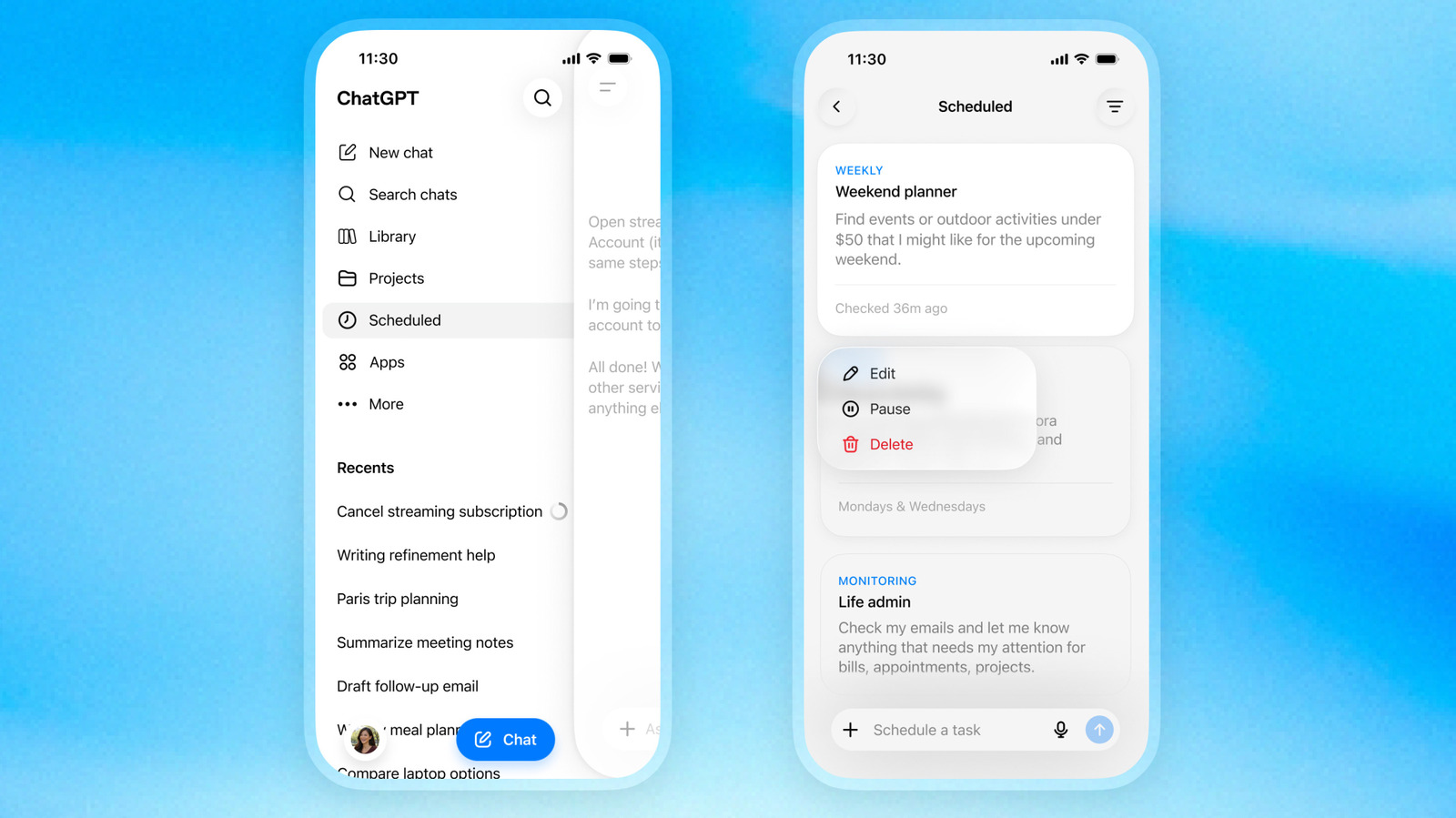
Inteligencia ArtificialAutomatización de tareas programadas en IA conversacional cambia flujos de trabajo ejecutivo
 Inteligencia Artificial
Inteligencia Artificial